سامانه جدید هوشمند ثبت تخلفات رانندگی
متخصصان کشورمان در یک شرکت دانش بنیان، موفق به تولید نسل جدید سامانه های هوشمند ثبت تخلف سرعت و تجهیز جاده های بین شهری به این سامانهها شدند.
به گزارش خبرگزاری موج، هدف از انجام این طرح دستیبابی به دانش فنی تولید نسل جدید سامانههای هوشمند ثبت تخلف سرعت با تکنیک تصویربرداری سه بعدی(استریو) است که در نهایت منجر به کاهش ضریب خطا در سامانههای ثبت سرعت و افزایش کارایی آنها خواهد شد. سیستمهای سنتی خارجی که هم اکنون در ثبت تخلفات مورد استفاده قرار می گیرد، عمدتا مبتنی بر سرعت سنجی بر اساس تکنولوژی راداری است و تنها در صورت تخلف اقدام به عکسبرداری از خودروی متخلف میکند اما سیستمهای مبتنی بر پردازش تصویر که توسط متخصصان کشورمان تولید شده، اطلاعات کلیه خودروهای عبوری را استخراج و به مرکز ارسال می
کند. سیدجمال خالقی مدیرعامل شرکت دانش بنیان نگرش رایانه پویا که این سامانه را تولید کرده است، با بیان اینکه سامانه هوشمند ثبت تخلفات شامل مجموعهای از تجهیزات نرم افزاری، سخت افزاری الکترونیک و ارتباطات است، گفت: این سامانه باید در کمترین زمان با بیشترین کیفیت اطلاعات همه ترددهای مقطع تحت پوشش از محور را به همراه پلاک، تصویر، کلاس(نوع)، سرعت خودرو و فاصله طولی و لاین عبوری از طریق بسترهای ارتباطی تامین شده ارسال کند. وی با تاکید بر اینکه مزیت اصلی سیستم FVSR - B مبتنی بر پردازش تصویرسه بعدی(استریو) است، تصریح کرد: برخی از ویژگیهای این سیستم شامل تشخیص سرعت
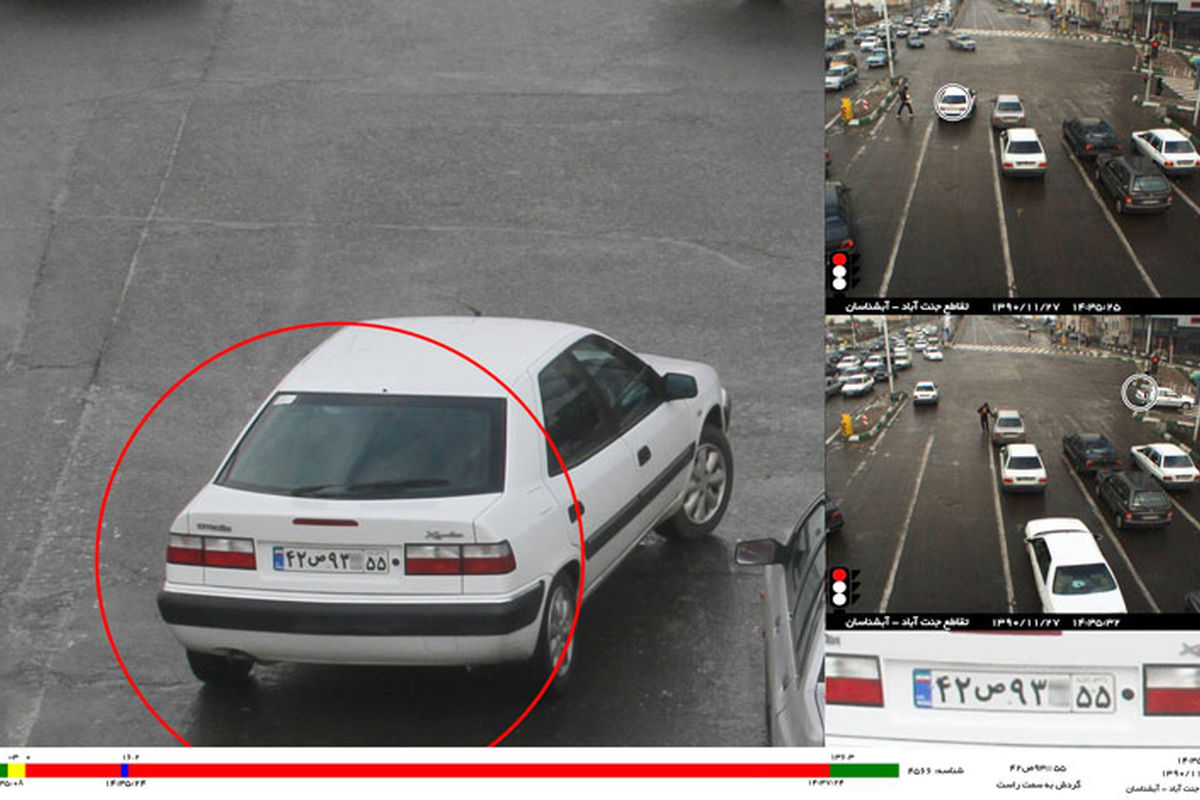
خودرو تا ۲۵۰ کیلومتر بر ساعت، تشخیص اتوماتیک پلاک خودرو، تشخیص لاین خودروی عبوری، ثبت تصویر رنگی مجزا برای ارائه به فرد متخلف، دارای پروژکتور مادون قرمز برای قرائت بهتر پلاک و امکان تشخیص پلاک در شب و وجود سیستم ارتباطات برای انتقال آنی اطلاعات به مرکز مانیتورینگ است. خالقی درباره عملکرد نسل جدید سامانههای هوشمند ثبت تخلف سرعت خاطرنشان کرد: دو دوربین سیاه و سفید واقع در راس به همراه یک عدد دوربین رنگی با سرعت حدود ۲۰ فریم در ثانیه از محدودهای حدود ۱۵ متری دوربینها واقع در سطح جاده فیلمبرداری کرده و تصاویر را از طریق پورت شبکه به پردازشگر ارسال میکند.
وی افزود: پردازشگر بر اساس الگوریتمهای پردازش تصویر، پلاکیابی را انجام داده و در صورت وجود پلاک در تصویر، نسبت به OCR و محاسبه سرعت لحظهای خودرو اقدام میکند. مشخصات اصلی خودرو یعنی پلاک و زمان عبور خودرو همزمان به سرور(واقع در مرکز مانیتورینگ) ارسال میشود. درصورت عدم وجود پلاک سیستم با خودرویابی اقدام به محاسبه سرعت میکند. همچنین عکس خودروها به مرکز ارسال میشود و سرور پس از دریافت اطلاعات به محاسبه سرعت متوسط میپردازد. خالقی درباره تکنیک تصویربرداری سه بعدی(Stereo Vision) به کار رفته در این سامانه گفت: دانش پردازش تصویر با پردازش حجم زیادی از دادگان
تصویر میتواند در اندازه گیری و درک فضای سه بعدی اطرافمان به ما کمک کند. تاکنون روشهای مختلفی در اندازهگیری از راه دور شامل استفاده از پرتو لیزر، امواج رادار و یا تکنیکهای پردازش تصاویر و یا ترکیبی از آنها مطرح شده است اما شاید تنها یک روش را بتوان نام برد که به عنوان روش غیر تهاجمی میتواند معرفی شود و آن روش، بینایی چند دوربینی است. وی درباره روش بینایی چند دوربینی توضیح داد: در این روش با استفاده از تغییراتی که در محل اجسام در تصاویر اخذ شده از دوربینهایی با موقعیتهای مکانی مختلف و حل معادلات هندسی مرتبط با آنها میتواند درک نسبتا دقیقی از مکان
اجسام در فضای سه بعدی داشت. این روشها به چند دسته تقسیم میشوند که از لحاظ اصول عملکردی یکسان هستند و شامل روش استریو حرکتی(Motion Stereo)، روش دو دوربینی(Stereo Vision) و یا چند دوربینی(Multi - camera Vision) که اختصاراً همه را همان روش استریو مینامند، هستند. خالقی ادامه داد: در روش استریو باید موقعیت دوربینهای استفاده شده نسبت به یکدیگر از جمله جابجایی و یا گردش آنها نسبت به هم با دقت بالایی تعیین شود. همچنین نیاز است پارامترهایی چون فاصله کانونی لنز دوربینها، نقطه کانونی تصاویر، میزان اعوجاج لنزها و نسبت غیرمربعی بودن پیکسلهای تصاویر مشخص شود که تمام فرآیند تخمین این
مقادیر تحت عنوان فرآیند کالیبراسیون سامانه استریو نام برده میشود که شاید یکی از مهمترین و پیچیدهترین مراحل استفاده از یک سامانه استریو باشد. تولید نسل جدید سامانه های هوشمند ثبت تخلف سرعت با حمایت ۵.۵ میلیارد ریالی صندوق حمایت از تحقیقات و توسعه صنایع الکترونیک(صحا) انجام شده و طبق توافق با اداره کل حمل و نقل و پایانههای استان اصفهان، در محورهای قم - کاشان - اصفهان(بزرگراه امیرکبیر) مورد بهره برداری قرار گرفته است. براین اساس قرار است محور قم - کاشان - اصفهان به ۲۸ سامانه با این تکنولوژی مجهز شود.






ارسال نظر